Zhang, K., & Liao, X. (2017). Theory and modeling of rotating fluids: Convection, inertial waves, and precession . Cambridge University Press. https://doi.org/10.1017/9781139024853
The inertial wave modes in rotating flow.
2 Introduction
Equations:
∂ u ∂ t + 2 z ^ × u + ∇ p = 0 (2.7) \frac{\partial \boldsymbol{u}}{\partial t}+2\hat{\boldsymbol{z}}\times\boldsymbol{u}+\nabla p=0 \tag{2.7}
∂ t ∂ u + 2 z ^ × u + ∇ p = 0 ( 2.7 )
∇ ⋅ u = 0 (2.8) \nabla\cdot\boldsymbol{u}=0 \tag{2.8}
∇ ⋅ u = 0 ( 2.8 )
Assuming solutions:
u ( r , t ) = u ( r ) e i 2 σ t , p ( r , t ) = p ( r ) e i 2 σ t (2.9) \boldsymbol{u}(\boldsymbol{r},t)=\boldsymbol{u}(\boldsymbol{r})e^{i2\sigma t},\ p(\boldsymbol{r},t)=p(\boldsymbol{r})e^{i2\sigma t} \tag{2.9}
u ( r , t ) = u ( r ) e i 2 σ t , p ( r , t ) = p ( r ) e i 2 σ t ( 2.9 )
2.2 Frequency Bound
The half-frequency bound:
− 1 ≤ σ ≤ 1 -1\le \sigma \le 1
− 1 ≤ σ ≤ 1
2.5 The Poincaré Equation
∇ 2 p − 1 σ 2 ( z ^ ⋅ ∇ ) 2 p = 0 (2.47) \nabla^2 p-\frac{1}{\sigma^2}(\hat{\boldsymbol{z}}\cdot\nabla)^2 p=0 \tag{2.47}
∇ 2 p − σ 2 1 ( z ^ ⋅ ∇ ) 2 p = 0 ( 2.47 )
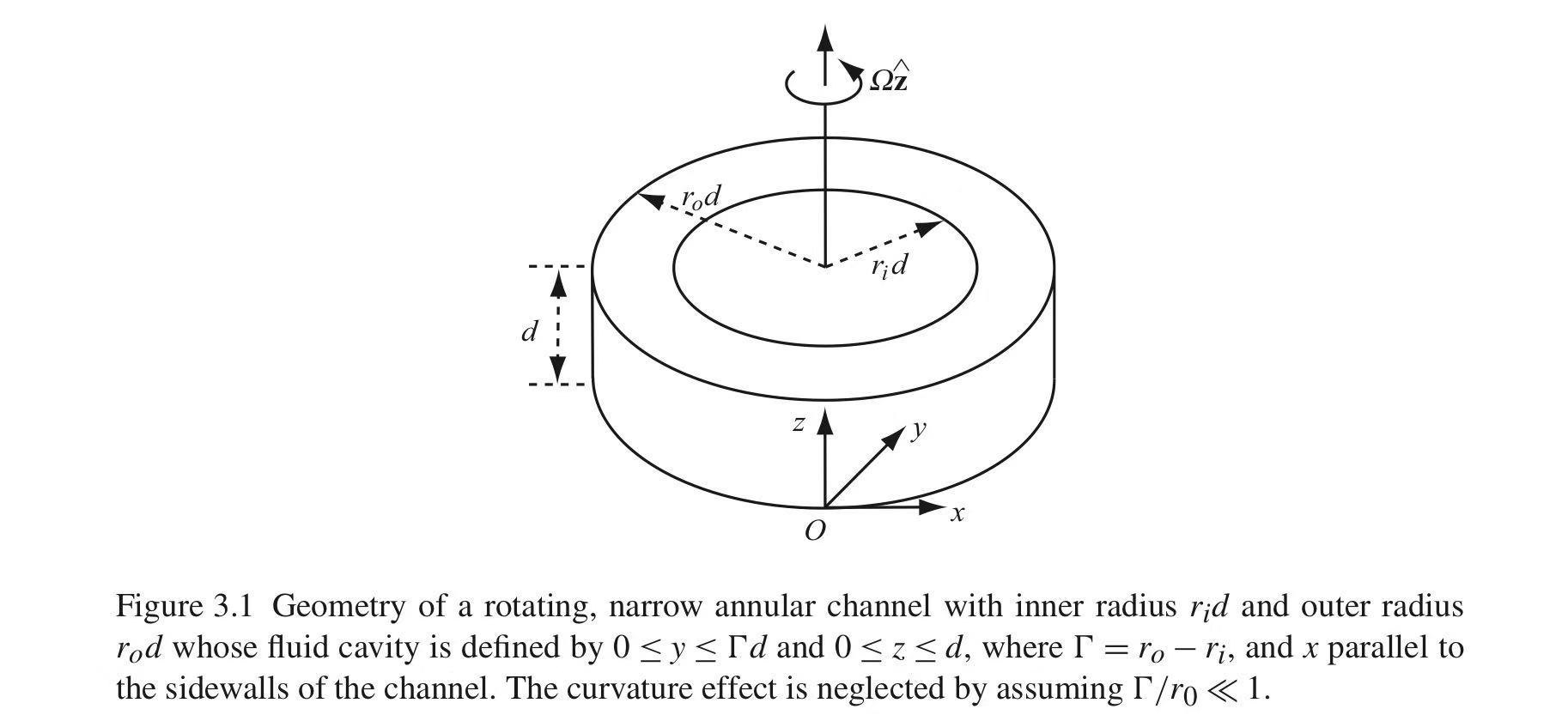
3 Rotating Narrow-gap Annuli
2 i σ x ^ ⋅ u − 2 y ^ ⋅ u + ∂ p ∂ x = 0 (3.1) 2i\sigma\hat{\boldsymbol{x}}\cdot\boldsymbol{u}-2\hat{\boldsymbol{y}}\cdot\boldsymbol{u}+\frac{\partial p}{\partial x}=0 \tag{3.1}
2 iσ x ^ ⋅ u − 2 y ^ ⋅ u + ∂ x ∂ p = 0 ( 3.1 )
2 i σ y ^ ⋅ u + 2 x ^ ⋅ u + ∂ p ∂ y = 0 (3.2) 2i\sigma\hat{\boldsymbol{y}}\cdot\boldsymbol{u}+2\hat{\boldsymbol{x}}\cdot\boldsymbol{u}+\frac{\partial p}{\partial y}=0 \tag{3.2}
2 iσ y ^ ⋅ u + 2 x ^ ⋅ u + ∂ y ∂ p = 0 ( 3.2 )
2 i σ z ^ ⋅ u + ∂ p ∂ z = 0 (3.3) 2i\sigma\hat{\boldsymbol{z}}\cdot\boldsymbol{u}+\frac{\partial p}{\partial z}=0 \tag{3.3}
2 iσ z ^ ⋅ u + ∂ z ∂ p = 0 ( 3.3 )
3.2 Axisymmetric Inertial Oscillations
We often employ a triple index notation, for example, u m n k \boldsymbol{u}_{mnk} u mnk σ m n k \sigma_{mnk} σ mnk
index
repersent
m m m the azimuthal structure
n n n the vertical structure
k k k the radial structure
The axisymmetric inertial oscillation mode:
x ^ ⋅ u 0 n k = [ k π 2 Γ ( 1 − σ 0 n k 2 ) ] sin ( k π y Γ ) cos n π z (3.13) \hat{\boldsymbol{x}}\cdot\boldsymbol{u}_{0nk}=\left[\frac{k\pi}{2\Gamma(1-\sigma_{0nk}^2)}\right]\sin\left(\frac{k\pi y}{\Gamma}\right)\cos n\pi z \tag{3.13}
x ^ ⋅ u 0 nk = [ 2Γ ( 1 − σ 0 nk 2 ) k π ] sin ( Γ k π y ) cos nπ z ( 3.13 )
y ^ ⋅ u 0 n k = [ i σ 0 n k k π 2 Γ ( 1 − σ 0 n k 2 ) ] sin ( k π y Γ ) cos n π z (3.14) \hat{\boldsymbol{y}}\cdot\boldsymbol{u}_{0nk}=\left[\frac{i\sigma_{0nk} k\pi}{2\Gamma(1-\sigma_{0nk}^2)}\right]\sin\left(\frac{k\pi y}{\Gamma}\right)\cos n\pi z \tag{3.14}
y ^ ⋅ u 0 nk = [ 2Γ ( 1 − σ 0 nk 2 ) i σ 0 nk k π ] sin ( Γ k π y ) cos nπ z ( 3.14 )
z ^ ⋅ u 0 n k = − ( i n π 2 σ 0 n k ) cos ( k π y Γ ) sin n π z (3.15) \hat{\boldsymbol{z}}\cdot\boldsymbol{u}_{0nk}=-\left(\frac{in\pi}{2\sigma_{0nk}}\right)\cos\left(\frac{k\pi y}{\Gamma}\right)\sin n\pi z \tag{3.15}
z ^ ⋅ u 0 nk = − ( 2 σ 0 nk inπ ) cos ( Γ k π y ) sin nπ z ( 3.15 )
with the half-frequency
σ 0 n k = ± n Γ ( Γ n ) 2 + k 2 (3.16) \sigma_{0nk}=\pm\frac{n\Gamma}{\sqrt{(\Gamma n)^2+k^2}} \tag{3.16}
σ 0 nk = ± ( Γ n ) 2 + k 2 n Γ ( 3.16 )
3.4 Non-axisymmetric Inertial Waves
x ^ ⋅ u m n k = 1 2 [ n 2 π 2 σ m n k sin ( k π y Γ ) − k m π Γ cos ( k π y Γ ) ] cos n π z e i m x (3.31) \hat{\boldsymbol{x}}\cdot\boldsymbol{u}_{mnk}=\frac{1}{2}\left[\frac{n^2\pi^2}{\sigma_{mnk}}\sin\left(\frac{k\pi y}{\Gamma}\right)-\frac{km\pi}{\Gamma}\cos\left(\frac{k\pi y}{\Gamma}\right)\right]\cos n\pi z\ e^{imx} \tag{3.31}
x ^ ⋅ u mnk = 2 1 [ σ mnk n 2 π 2 sin ( Γ k π y ) − Γ k mπ cos ( Γ k π y ) ] cos nπ z e im x ( 3.31 )
y ^ ⋅ u m n k = i 2 [ ( n 2 π 2 + m 2 ) sin ( k π y Γ ) ] cos n π z e i m x (3.32) \hat{\boldsymbol{y}}\cdot\boldsymbol{u}_{mnk}=\frac{i}{2}\left[\left(n^2\pi^2+m^2\right)\sin\left(\frac{k\pi y}{\Gamma}\right)\right]\cos n\pi z\ e^{imx} \tag{3.32}
y ^ ⋅ u mnk = 2 i [ ( n 2 π 2 + m 2 ) sin ( Γ k π y ) ] cos nπ z e im x ( 3.32 )
z ^ ⋅ u m n k = − i 2 [ m n π σ m n k sin ( k π y Γ ) + n k π 2 Γ cos ( k π y Γ ) ] sin n π z e i m x (3.33) \hat{\boldsymbol{z}}\cdot\boldsymbol{u}_{mnk}=-\frac{i}{2}\left[\frac{mn\pi}{\sigma_{mnk}}\sin\left(\frac{k\pi y}{\Gamma}\right)+\frac{nk\pi^2}{\Gamma}\cos\left(\frac{k\pi y}{\Gamma}\right)\right]\sin n\pi z\ e^{imx} \tag{3.33}
z ^ ⋅ u mnk = − 2 i [ σ mnk mnπ sin ( Γ k π y ) + Γ nk π 2 cos ( Γ k π y ) ] sin nπ z e im x ( 3.33 )
with the half-frequency
σ m n k = ± n π n 2 π 2 + m 2 + ( k π / Γ ) 2 (3.34) \sigma_{mnk}=\pm\frac{n\pi}{\sqrt{n^2\pi^2+m^2+(k\pi/\Gamma)^2}} \tag{3.34}
σ mnk = ± n 2 π 2 + m 2 + ( k π /Γ ) 2 nπ ( 3.34 )